
金年会学习动态
 发布日期:2024-11-23
发布日期:2024-11-23  浏览量:
浏览量:
金字招牌起因就是这位名叫Anxo Biasi的小哥,有一天观察起了自家猫猫,突发奇想:能否将猫视为一个在人产生的势场中运动的质点,用物理方程来描述其行为?
此前虽然物理学家已经研究过猫的一些特性(比如猫总能四脚着地的能力),还有下图这种用来描述猫越小越可爱的“黑洞猫”幽默比喻。
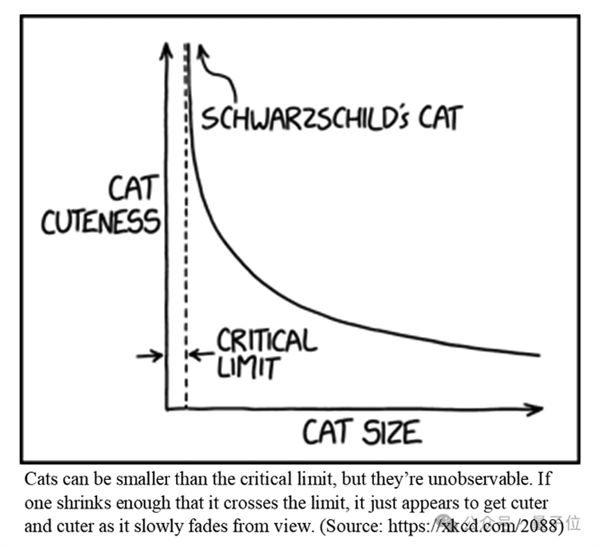
还有猫猫通常会对主人的呼唤爱答不理,它们会在最喜欢的人的腿上待更久
(点粒子,物理学中一种粒子理想化描述,主要特点是不占用空间。举个例子,只要离得够远,各种形状的物体都会看似于一个点。)
明确指出的是,这是一项理论研究,没有进行动物实验,所有结论都建立在日常观察和物理建模的基础上。

P2:当猫趴在人身上休息时(如趴在腿上、肚子上、背上),极小的刺激就可能使它们离开这个位置(如一只苍蝇、一个难以察觉的声音、邻近星系原子的-衰变)。产生离开所需的扰动强度取决于猫对其所依靠的人的依恋程度。
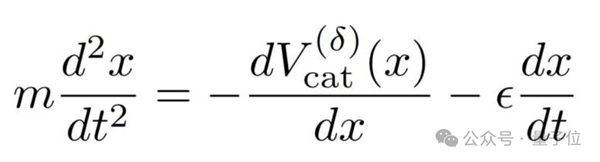
作为初步近似,他们将猫的动力学模型定义为在存在外部势能(由静止的人引起)和摩擦项的情况下,一个服从牛顿力学的点粒子。
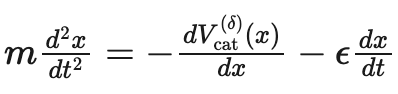
其中x(t)表示猫在时间t相对于位于x=0处的人的位置,m0是猫的质量,并且?0是摩擦系数,其值取决于每只猫。
将微分方程转化为基于有理函数的形式。它提供了对平衡点的控制,这样管理平衡点的数量、相对位置和稳定性。

其中,g0是耦合常数(从现在起将g简化设置为g=1,但这不会改变模型的定性图像);在[0,1]区间,反映了猫对人的依恋。
当>0时, 点x=0是稳定的。并且值越大,猫的依恋越强。当=1时,这表明猫对人有很强的依恋。
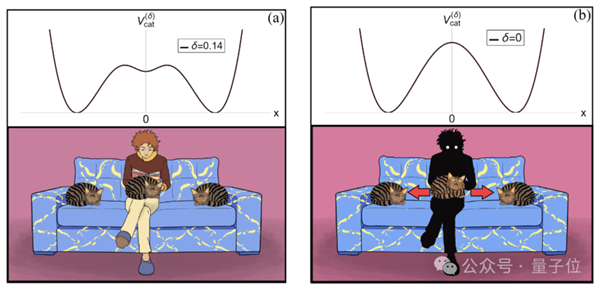
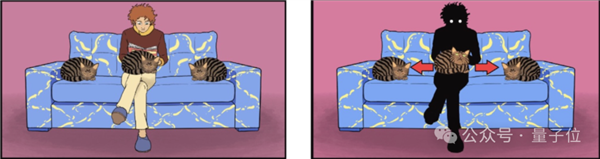
图1:(a)猫依附在人身上,(b)人对猫来说完全是陌生人。这两种情况猫都处于静止状态,处于三个平衡点。
此外,需要公式 (1) 中的摩擦项来减少能量。否则,猫在活动一段时间后就不会趋于静止状态,比如左右两侧状态。
最后要注意的是,猫是在三维空间中移动的。然而,由于最重要的参数是猫和人之间的距离,我们假设猫沿着一条线移动,这进一步简化了分析。
在大多数情况下,最终位置将是全局最小值,特别是对于猫和人之间的弱联系(较小时)。
该陈述的第二部分是通过势能对的依赖性来捕捉的。也就是说当=0时, x=0是不稳定的,这表明在任意小的扰动下,猫都会偏离人。随着的增长,需要更强的刺激才能将猫从人身上分离。
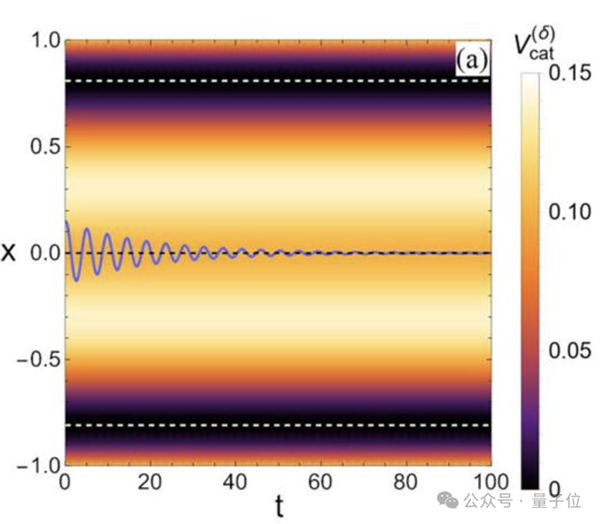
P3, “当猫被人抚摸时,它们会以振荡运动来回移动。” 这种效应也在x=0附近的稳定区域重现(对于>0的情况)。
当猫平静地靠近人(动能低)时,它们会围绕人进行小幅度的振荡,并收敛到静态学习动态,这归功于方程中的摩擦项。
即使被陌生人抚摸(=0),猫也可能表现出这些稳定的振荡,但为此必须添加一个新变量(呼噜声)。
P4被呼唤的行为被建模为猫向人发出的冲动,这会导致动能增加,这种能量注入可能足以或不足以克服势垒。由于能量不足,猫会在一段时间后,再次收敛到静止位置。
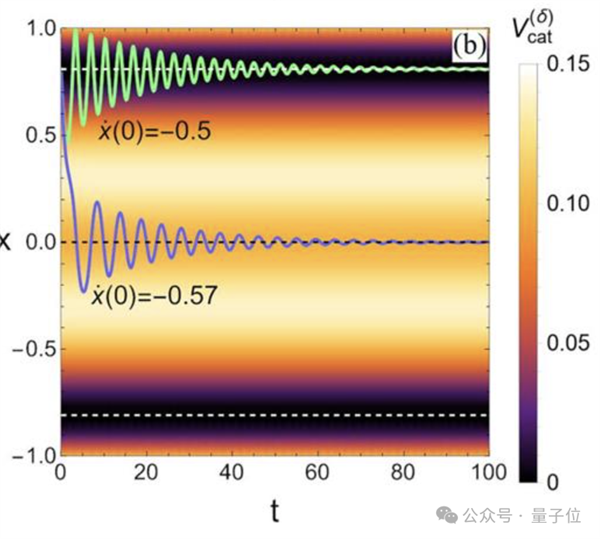
当猫受到足够强的刺激(冲动)接近人时,也就来到了P5:“当猫决定接近呼唤它们的人时,它们经常在途中分心而无法接近人。” 这一观察结果也用上图绿色(较浅)轨迹所示。
这一现象中,猫的质量也会起作用(Doge), 猫获得的速度会随着质量的增加而减小
体重较轻的猫(例如小猫)会表现出精力充沛的动作并对任何刺激做出反应,而体重较重的猫(例如老年猫或喂食过度的猫)则不会表现出同样的热情。这也与观察结果明显一致。

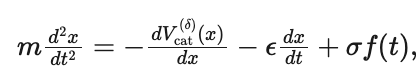
其中为常数,f (t) 为外部随机强迫。在给定时间内产生快速移动的概率取决于摩擦力?和强迫的值。
这使我们能够根据每只猫的特殊性调整模型。例如,小猫不断表现出这些时期,对应于较低的摩擦力和较高的强迫力,而老年猫则很少表现出这种活动。
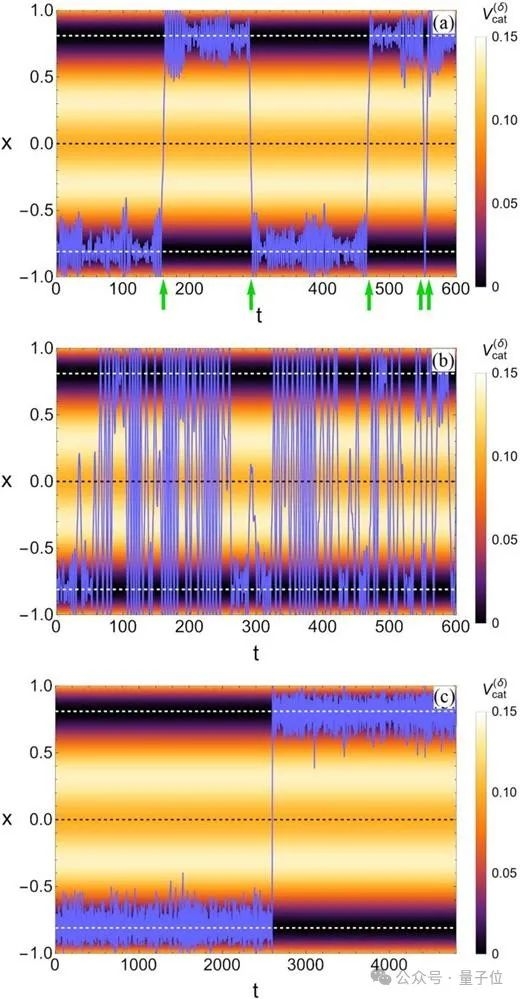
(a)显示猫可能突然从一个平衡点跑到另一个平衡点,在那里停留一段时间,然后再次随机地回到上一个平衡点。(b)为小猫(c)为老年猫
一部分原因在于当猫被抚摸并开始发出呼噜声时,人们通常会有继续抚摸猫的冲动,从而通过这种方式增强了过程的稳定性。
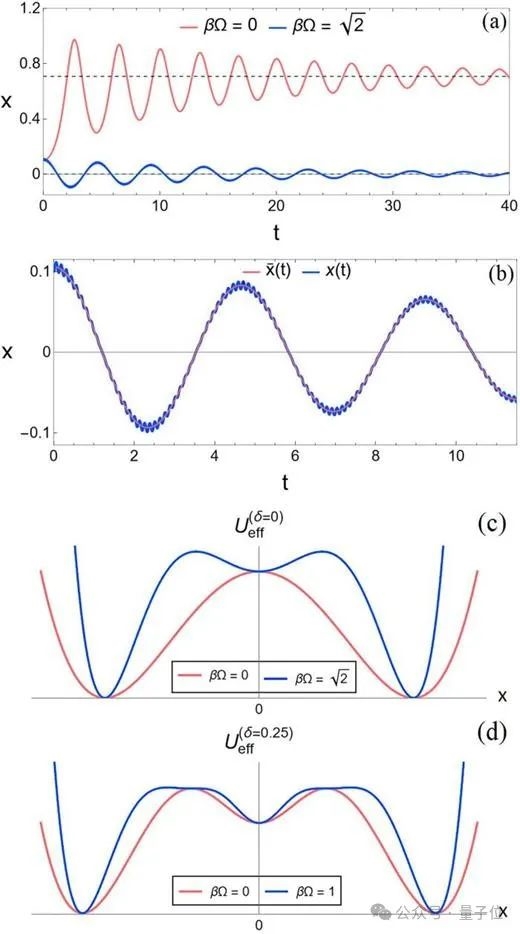
以卡皮察摆作为类比,猫在发出呼噜声时会振动,振动可以作为不稳定平衡点的稳定机制,由此定义猫猫呼噜声运动模型:


其中G (x) 暂时为无约束函数,和分别为猫中振动的振幅和频率。此类驱动项模拟了在时间振荡场中移动或受到周期性强迫的粒子。
作者表示,这种互动模型旨在用于经典力学的入门课程,让学生更好地熟悉平衡点、势垒、摩擦或外力等概念。

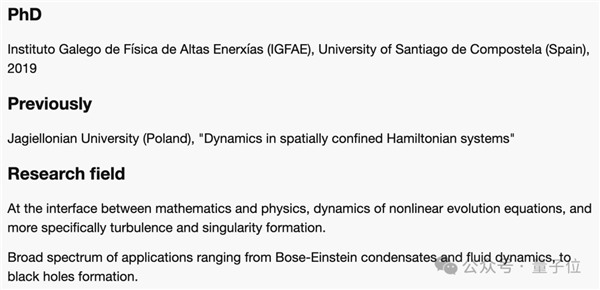
他主要研究非线性演化方程的动态行为,特别关注奇异点的形成、长期动态行为和湍流问题,这在流体动力学、玻色-爱因斯坦凝聚态和广义相对论等领域具有广泛应用。
Anxo此前通过巴黎高等师范学院物理系的La Caixa青年领袖计划,加入了加利西亚高能物理研究所(IGFAE)。
在IGFAE,他已经完成了博士论文,并将加入弦理论相关领域的研究团队,继续研究物理学和数学交叉领域的非线性演化方程。
建立猫运动方程,最初源自于他在愚人节的一个想法:想找一种对学生更有吸引力的有趣方式来解释物理。
他本人的猫猫Eme给了他灵感,通过仔细观察Eme与他互动时的行为,Anxo发现这种行为模式具有重复性和可预测性,于是开始自己尝试用物理模型来描述这些行为。

这项工作还可以延伸到各种场景,除了可以从物理学角度探索猫与人之间互动特征,还可以探讨猫与猫、狗与狗或狗与人之间的互动。
上一篇 : 学习动态
下一篇:暂无